
کارگاه ساخت بدنه ربات چند منظوره - اجزاء ساخته شده با پرینت سه بعدی
معرفی پروژه
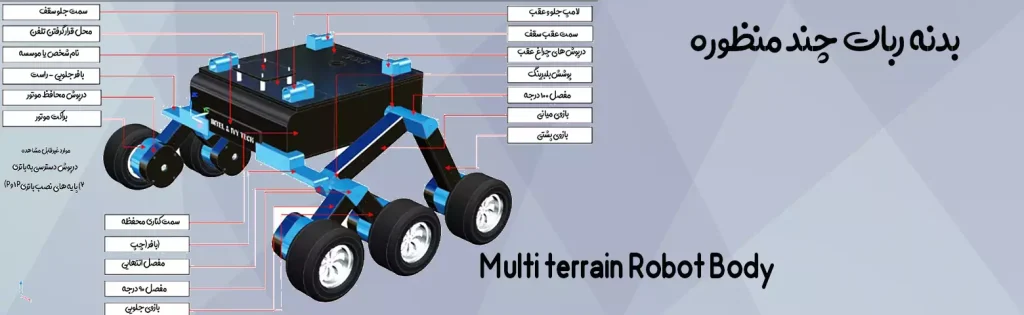
ما یک جایگزین تمامزمینی برای خودروی CarBot اصلی ارائه میکنیم. این وسیله که در همکاری با شرکت Ivy Tech LTD توسعه داده شده، دارای اجزای کمهزینه و قابلچاپ سهبعدی است. طراحی MTV از مفاهیم وسایل نقلیه اکتشافی الهام گرفته شده و از شش چرخ متحرک با پیکربندی Rocker-Bogie بهره میبرد. این وسیله مانند یک تانک عمل کرده و کنترل آن به صورت دستی بسیار ساده است.
مراحل ساخت و مونتاژ
1. چاپ سهبعدی قطعات
برای ساخت این خودرو، قطعات زیر باید چاپ شوند:
| شماره | گروه | نام قطعه | تعداد | وزن (گرم) | مدت چاپ (ساعت) | هزینه (€) |
|---|---|---|---|---|---|---|
| A1 | مجموعه موتور | پوشش بالای موتور | 6 | 498 | 36 | 23.51 |
| A2 | مجموعه موتور | پوشش پایین موتور | 6 | – | – | – |
| A3 | مجموعه موتور | پایه موتور | 6 | 251 | 17.5 | 11.98 |
| A4 | اتصالات | اتصال(مفصل) 90 درجه | 2 | 228 | 20.5 | 15.05 |
| A5 | اتصالات | اتصال 100 درجه | 1 | – | – | – |
| A6 | اتصالات | اتصال 100 درجه معکوس | 1 | – | – | – |
| A7 | اتصالات | اتصال(مفصل) انتهایی | 2 | – | – | – |
| A8 | پایهها | بازوی جلو | 4 | 317 | 22.5 | 14.97 |
| A9 | پایهها | بازوی میانی | 2 | – | – | – |
| A10 | پایهها | بازوی عقب | 2 | – | – | – |
| A11 | پوشش بلبرینگ | محافظ بلبرینگ | 4 | 13 | 1.5 | 0.60 |
تنظیمات پیشنهادی چاپ سهبعدی:
ارتفاع لایه: 0.2mm
ضخامت دیواره: 1.5mm
تراکم پرشدگی: 20%
الگوی پرشدگی: Grid
سرعت چاپ: 80 mm/
2. مونتاژ الکترومکانیکی
2.1. لیست قطعات الکترونیکی
| شماره | توضیحات | تأمینکننده | قیمت (€) | تعداد | هزینه کل (€) |
| O1 | موتور DC JGB37-520 با انکودر | AE | 8.12 | 6 | 48.72 |
| O2 | تایر 2.8″ (6 عدد) | US/EU | 23.06 | 6 | 138.36 |
| O3 | کابل 7 هستهای 0.5mm² (5m) | US/EU | 20.61 | 0.25 | 5.15 |
| O4 | داکت کابل D-Line | US/EU | 9.99 | 1 | 9.99 |
| O5 | گلند کابل PG7 (50 عدد) | US/EU | 9.99 | 0.5 | 4.99 |
هزینه کلی قطعات الکترونیکی: حدود 500€
2.2. مونتاژ مکانیکی
مونتاژ مکانیکی شامل مراحل زیر است:
مونتاژ ماژولهای موتور
نصب محفظههای موتور
اتصال موتورها به قاب پرینت شده
تثبیت چرخها به شفت موتور
مونتاژ پایهها
اتصال پایههای جلو، وسط و عقب
نصب بلبرینگها و کابلهای مورد نیاز
مونتاژ شاسی
اتصال پایهها به شاسی اصلی
استفاده از پیچها و مهرههای مناسب
مونتاژ بخش اصلی خودرو
نصب بخشهای بدنه
نصب واحد تأمین انرژی و کنترل
تست و برنامهنویسی
بررسی صحت عملکرد موتورها و حسگرها
برنامهریزی و کالیبراسیون نهایی
جدول سنسورها و قطعات الکترونیکی نسخه چند منظوره MTV
| مولفه | مشخصات | تعداد | توضیحات |
|---|---|---|---|
| پردازنده مرکزی | NVIDIA Jetson Xavier NX | 1 | پردازش گرافیکی پیشرفته برای بینایی ماشین و SLAM |
| موتورها | موتور BLDC 48V (گشتاور 15Nm با فیدبک اینکودر) | 4 | کنترل حلقه بسته با ODrive v3.6 |
| درایور موتور | ODrive Pro v3.6 (پشتیبانی از CAN Bus) | 4 | کنترل دقیق سرعت و موقعیت با رزولوشن بالا |
| سنسور لیدار | Livox Mid-360 (اسکن ۳۶۰ درجه، برد 260m) | 1 | نقشهبرداری سهبعدی محیطی |
| دوربین حرارتی | FLIR Lepton 3.5 (رزولوشن 160×120) | 1 | تشخیص حرارتی در شرایط کمنور یا مه |
| سنسور رادار | AWR1843 (77GHz، برد 300m) | 1 | تشخیص اجسام متحرک در شرایط آب و هوایی سخت |
| سنسور گاز/دما | MQ-2 + DS18B20 | 2 | نظارت بر کیفیت هوا و دمای محیط |
| ماژول ارتباطی | Quectel RG500Q (5G + GPS RTK) | 1 | ارتباط پرسرعت و موقعیتیابی دقیق (دقت ±1cm) |
| باتری | Li-S 6S (28.8V, 10,000mAh) | 1 | زمان کارکرد: ~8 ساعت، مقاوم در برابر شارژ سریع |
| سیستم ناوبری | ADIS16470 (IMU صنعتی 10 محوره) | 1 | اندازهگیری اینرسی با نویز پایین |
| مبدل قدرت | DC-DC 48V به 12V/5V (10A) | 2 | تامین برق پایدار برای ماژولهای حساس |
تفاوتهای کلیدی بین چند منظوره و کامیون RC
| ویژگی | چند منظوره | کامیون RC |
|---|---|---|
| هدف کاربردی | ماموریتهای نظامی/اکتشافی | مسابقات آفرود و حمل بار |
| پردازنده | NVIDIA Jetson (پردازش هوش مصنوعی) | STM32 (کنترل Real-Time) |
| سنسورهای اصلی | لیدار 3D + رادار 77GHz + دوربین حرارتی | ژیروسکوپ + سنسور شیب + سنسور ضربه |
| ارتباطات | 5G + GPS RTK | رادیو 2.4GHz |
| مصرف انرژی | ~200W | ~80W |