

📊 نگاه علمی — چرا دنبالکردن خط هنوز مهم است؟
- طبق یک تحلیل و meta-analysis تازه (2025)، رباتهای دنبالکننده خط به رغم سادگی، «یک بخش اساسی و مؤثر در توسعه سیستمهای پیچیدهتر رباتیک» باقی ماندهاند؛ چون هم “سادگی + قابلیت ساخت با هزینه پایین” دارند و هم به عنوان بستر آموزشی و تحقیقاتی عالی برای کنترل، حسگری، تصمیمگیری و ناوبری.
- به زبان دیگر: دنبالخط هنوز پایهای برای حرکت به سمت رباتهای خودران پیچیدهتر، ناوبری هوشمند، و رباتهای کاربردی (مثلاً انبار، لجستیک، حمل نقل داخلی) است.
خلاصهی ایده
دنبال کردن خط از قدیمیترین تمرینهای رباتیک است؛ سالها در المپیادها و مسابقات دانشآموزی استفاده شده تا دانشآموزان مفهوم «حسگر، تصمیمگیری و عمل» را درک کنند. در CarBot این ایده ساده، با کمک دوربین موبایل و هوش مصنوعی به یک پروژهی حرفهای تبدیل شده است.
🔎 مقدمه — ربات دنبالکننده خط چیست؟
- ربات «دنبالکننده خط» (Line Follower Robot) رباتی است که با استفاده از سنسورها مسیر (معمولاً یک خط سیاه روی زمینه روشن یا برعکس) را تشخیص میدهد و با هدایت موتورها، خودش را روی آن مسیر نگه میدارد.
- اجزای پایهای چنین رباتی معمولاً شامل: حسگر (معمولاً مادون-قرمز / IR یا سنسور بازتاب نور)، میکروکنترلر برای پردازش، موتورها و درایور موتورها هستند.
این ایده — ساده اما مؤثر — یکی از نخستین گامها برای آموزش مفاهیم هدایت خودکار (autonomous navigation) و کنترل رباتیک است
توضیح مختصر
در نسخههای کلاسیک، ربات با دو سنسور مادونقرمز، تضاد بین رنگ خط و زمینه را تشخیص میداد. اما در CarBot دوربین گوشی دقیقا مانند چشم انسان مسیر را میبیند و مدل هوش مصنوعی مسیر را تشخیص میدهد. نتیجه این است که ربات میتواند روی مسیرهای پیچیده، چندشاخه و حتی با انحناهای تند هم حرکت کند و خودش سرعت و زاویهی فرمان را تنظیم کند.
کاربر ابتدا یک مسیر روی زمین (پوستر، نوار چسب یا مت) آماده میکند، سپس در اپلیکیشن، مدل دنبالخط را فعال میکند یا کد مخصوص را اجرا میکند. بعد از چند تست و تنظیم، میتواند الگوریتم را تغییر دهد؛ مثلاً حد سرعت را افزایش دهد، خطاها را لاگ کند یا حتی حالت «سبقت از موانع روی خط» را اضافه کند. این پروژه یک تمرین فوقالعاده برای فهم مباحثی مثل کنترل، فیدبک، پردازش تصویر و برنامهنویسی رویدادمحور است.
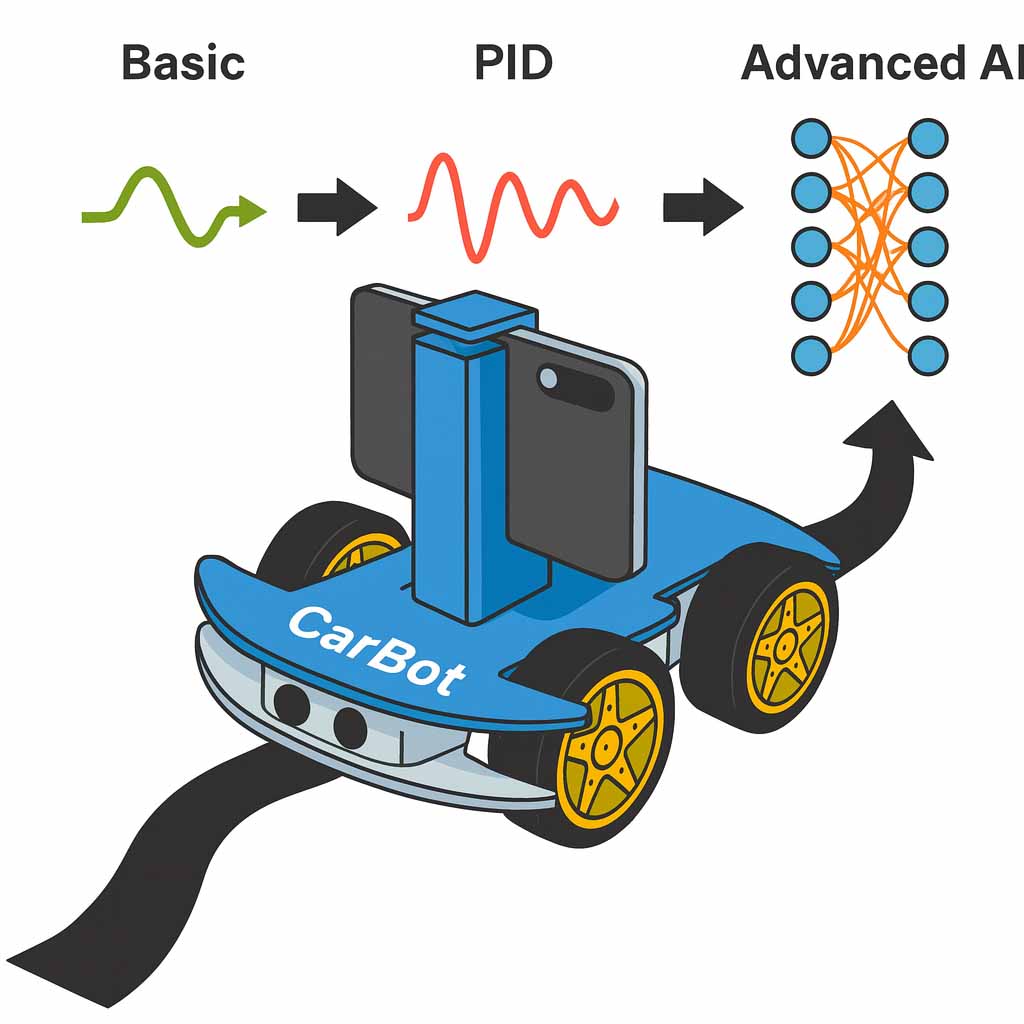
📜 تاریخچه و سیر تکامل “دنبال-خط”
- نسل ساده — «خط سفید/سیاه + سنسور»
در ابتدا (و هنوز هم) پایهترین نوع رباتهای دنبالکننده خط، از سنسورهای نوری ساده (مثلاً مادون قرمز) استفاده میکردند. اگر سنسور روی خط (مثلاً سیاه) قرار میگرفت یا خارج از آن بود، فرمان چرخش یا حرکت مستقیم صادر میشد..- این روش برای مسیرهای ساده، مستقیم یا با پیچ های ملایم مناسب بود.
- اما وقتی مسیر پیچیدهتر میشد، سرعت بالا بود یا تغییرات ناگهانی — دقت و پایداری کاهش پیدا میکرد.
- کنترل بهتر با الگوریتم کنترل (مثل PID)
برای بهبود عملکرد — نه فقط خاموش/روشن — مهندسان به کنترل دقیقتر روی موتورها پرداختند: بهکارگیری الگوریتمهایی مثل PID (کنترل کننده تناسبی–انتگرالی–مشتقی) برای تنظیم سرعت چرخها بر اساس «فاصله از مرکز خط» یا «خطا از مسیر.- این کار باعث میشد ربات بتواند پیچها را نرمتر و با ثباتتر طی کند، و لغزش یا انحراف ناگهانی نداشته باشد.
- پروژههایی با Arduino و سنسورهای IR یا بازتاب نور معمولاً از همین رویکرد استفاده میکردند.
- سنسورها و سختافزار بهتر — آرایه سنسور، سنسور رنگ، سنسورهای دقیقتر
با پیشرفت سختافزار، به جای یک یا دو سنسور ساده، از آرایه سنسورها استفاده شد تا موقعیت دقیقتر خط نسبت به مرکز ربات تشخیص داده شود
همچنین برخی پژوهشها به سنسورهای رنگ یا سنسورهای حساستر به تغییرات نور و پسزمینه روی آوردند تا قابلیت تشخیص خط سریعتر و دقیقتر شود- این باعث شد ربات بتواند مسیرهای پیچیدهتر یا با پسزمینه کمتر یکنواخت را دنبال کند.
- ادغام دید ماشین / بینایی کامپیوتری — دوربین بهجای/علاوه بر سنسورهای نور
در گام بعد، رباتها شروع به استفاده از بینایی کامپیوتری (Computer Vision) کردند: بهجای یا همراه با سنسورهای ساده IR، از دوربین استفاده میشد تا مسیر را بر اساس رنگ، کانتراست یا حتی الگوریتمهای تشخیص لبه دنبال کنند.- این امکان داده شد مسیرهایی با رنگ یا الگوهای خاص (نه فقط سیاه/سفید ساده) دنبال شود.
- همچنین برای مسیرهای متغیر یا محیطهایی که نور یا پسزمینه متفاوت دارند — عملکرد پایدارتر میشد.
- اضافه کردن قابلیتهای جانبی — اجتناب از موانع، تثبیت مکان، مسیر پیچیده
با پیشرفت، رباتها فقط دنبال خط نبودند؛ بلکه برای کاربردهای واقعیتر، قابلیتهایی مثل تشخیص موانع، تثبیت موقعیت (با انکودر چرخ، سنسور IMU، یا سنسورهای حرکت) و ناوبری پیچیدهتر هم به آنها اضافه شد..
به عنوان مثال، یک پروژه بر پایه STM32 توانسته هم «دنبالکردن خط» و هم «اجتناب از مانع» را ترکیب کند. - ورود هوش مصنوعی و یادگیری (AI / ML)
اخیراً با پیشرفت هوش مصنوعی و یادگیری ماشین، ایدهی «دنبالکردن خط» ساده به «درک محیط + تصمیمگیری هوشمند» نزدیکتر شده است. به عنوان مثال، پروژههایی وجود دارند که با استفاده از الگوریتمهای یادگیری، ربات را قادر میکنند تا شرایط محیط (نور، منحنی، تداخل با پسزمینه) را تشخیص دهند و تصمیمهای هوشمند برای هدایت بگیرند.
همچنین تحليلها و مرورهایی وجود دارد که روند کلی رباتهای دنبالکننده خط را در زمینهی ادغام با سیستمهای پیشرفتهتر بررسی میکند. - پیشرفتهترین نسلها — رقابتی، صنعتی، چندسنسوری
رباتهایی که مدرنتریناند، معمولاً:- از آرایه سنسورها + بینایی + الگوریتم کنترل پیشرفته استفاده میکنند.
- مجهز به انکودر چرخ، سنسور حرکت (IMU / ژیروسکوپ) یا سنسورهای اضافی برای پایداری.
- قادرند مسیرهای پیچیده، سرعت بالا، جابجایی سریع و حتی تغییر پسزمینه یا نور را مدیریت کنند.
- در کاربرد صنعتی یا تحقیقاتی استفاده میشوند (مثلاً مسیر در انبار، خطوط تولید، یا رباتهای خودران شهری/داخلی).
- جدیدترین مرورها و تحلیلها
مرور اخیر علمی نشان میدهد که رباتهای دنبالکننده خط، به رغم سادگی ظاهری، بخش مهمی از پایههای سیستمهای پیچیدهتر در رباتیک هستند — و به عنوان سکوی آزمایش برای کنترل، حسگری و تصمیمگیری خودکار، هنوز کاربرد و تحقیق زیادی دارند
⚙️ مقایسه انواع مختلف روشها + مزایا و محدودیتها
|
روش / نسل |
مزایا |
محدودیتها / چالشها |
|
سنسور IR ساده (یک/دو سنسور) |
ساده، ارزان، مناسب برای مسیرهای ساده |
دقت کم در مسیرهای پیچیده، حساس به قرارگیری سنسور، ناپایدار اگر خط یا پسزمینه تغییر کند |
|
آرایه سنسوری + کنترل PID |
دنبال مسیر با دقت بهتر، پیچها را نرمتر میگیرد |
پیچیدگی بیشتر، نیاز به تنظیم دقیق PID، همچنان وابسته به نور/رنگ سطح |
|
سنسور رنگ / سنسور پیشرفتهتر |
توانایی تشخیص بهتر خط در شرایط نور یا پسزمینه متغیر |
هزینه بالاتر، نیاز به پردازش بیشتر |
|
بینایی کامپیوتری (دوربین) |
انعطاف بالا — تشخیص مسیرهای غیرمعمول، رنگی، الگو دار، توانایی کار در شرایط متنوع |
نیاز به پردازش تصویر، تأخیر، نیاز به قدرت محاسباتی و الگوریتم مناسب |
|
سنسور + بینایی + کنترل + سنسور حرکت / انکودر |
دقت و پایداری بالا، مناسب مسیر پیچیده، سرعت بالا، مقاوم در محیط متغیر |
پیچیده، گرانتر، نیاز به تنظیمات دقیق، طراحی سختتر |
|
با هوش مصنوعی / یادگیری ماشین |
قابلیت تطبیق با شرایط جدید، تشخیص هوشمندتر، انعطاف برای مسیر/پسزمینه/شرایط ناگهانی |
نیاز به داده و آموزش، پیچیدگی نرمافزاری، ممکن است نیاز به سختافزار قدرتمند |
🤖 نقش هوش مصنوعی در دنبال-کردن خط — چرا و چطور؟
- با روش کلاسیک، ربات فقط بر پایه سیگنال سنسور تصمیم میگیرد؛ اما با AI/ML، ربات میتواند الگوها، شرایط تغییر نور، سایه، رنگ پسزمینه متفاوت و حتی دوراهی/تقاطع مسیر را تشخیص دهد و رفتار منعطفتری داشته باشد.
- در پژوهشی که از بینایی تعبیهشده (embedded computer vision) استفاده کردهاند، ربات با دوربین و الگوریتمهای پردازش تصویر مسیر را تشخیص داده — یعنی دید رباتی شبیه به چشم انسان/ماشین. (arXiv)
- وقتی چنین سیستمهایی با سنسورهای اضافی (ژایروسکوپ، انکودر، …) ترکیب شوند، ربات میتواند ثبات حرکتی، پیشبینی منحنی، مقابله با لغزش یا تغییرات مسیر را بهتر انجام دهد — که برای کاربرد صنعتی یا واقعی ضروری است. (
- علاوه بر این، هوش مصنوعی و یادگیری ماشین میتوانند به ربات ساختار شناختیتر بدهند: مثلاً یاد بگیرند که مسیرهای متفاوت را تشخیص دهند، خودشان خودشان را کالیبره کنند، یا در محیط غیرایدهآل تصمیم بگیرند.
در نتیجه: AI و بینایی کامپیوتری ربات دنبالکننده خط را از «ربات آموزشی/آزمایشی» به «ربات واقعگرا / قابل استفاده» تبدیل کردهاند.
🧰 استفاده از CarBot برای پروژه دنبال-خط — آیا امکانپذیر است؟ نکات و چالشها
- CarBot یک پلتفرم برای ساخت ربات با استفاده از گوشی موبایل به عنوان “بُعد هوش / پردازش تصویر / بینایی” است. کاربر میتواند با سختافزار ساده + موبایل هوشمند، ربات بسازد.
- اگر بخواهی دنبالکردن خط را با CarBot انجام بدهی، میتوانی دوربین موبایل + الگوریتم پردازش تصویر را برای تشخیص خط بهکار بگیری — یعنی از همان نقطه قوت «بینایی + هوش» استفاده کنی.
- مزایا: نیاز کمتر به سنسورهای IR سختافزاری، انعطاف بیشتر برای تغییرات مسیر/رنگ/پسزمینه، قابلیت توسعه به ویژگیهای پیشرفتهتر (مثل تشخیص موانع، ناوبری پیچیدهتر) با استفاده از همان سختافزار.
- چالشها:
- نیاز به نوشتن یا انطباق الگوریتم پردازش تصویر (thresholding، تشخیص لبه، تشخیص رنگ/کانتراست یا حتی یادگیری ماشین) برای شناسایی دقیق خط.
- وابستگی به نور محیط، کیفیت دوربین، زاویه نصب دوربین نسبت به سطح زمین — اگر تنظیم دقیق نباشد دقت کاهش مییابد.
- تأخیر در پردازش تصویر نسبت به سنسورهای سختافزاری ساده — اگر سرعت ربات بالا باشد، ممکن است ربات دیر عکسالعمل نشان دهد.
- نیاز به هماهنگی بین سیستم بینایی (موبایل)، کنترل حرکتی (موتورها) و چارچوب نرمافزاری CarBot — یعنی پروژه کمی پیچیدهتر است نسبت به ربات ساده IR + میکروکنترلر.
- نتیجه: بله — استفاده از CarBot برای دنبال-کردن خط ممکن و معقول است — به شرط آنکه برای تشخیص خط، الگوریتم پردازش تصویر مناسب بنویسی و سختافزار را به دقت تنظیم کنی. این ترکیب «سادگی سختافزار + هوشمندی موبایل/بینایی» میتواند مدلی مدرن برای «دنبالخط پیشرفته» باشد.
✅ نتیجهگیری و پیشنهاد برای شروع
- اگر تازه شروع میکنی و میخواهی با مفاهیم کنترل و رباتیک آشنا شوی — بهتر است با مدل ساده IR + کنترل PID شروع کنی.
- اگر دنبال عملکرد دقیقتر و انعطاف پذیرتر هستی — آرایه سنسورها + بینایی + کنترل پیشرفته میتواند انتخاب خوبی باشد.
-
اگر میخواهی پروژه مدرن و آیندهنگر داشته باشی — ترکیب بینایی (دوربین) + کنترل + هوش/تصمیم هوشمند (مثلاً با استفاده از CarBot) راه بسیار جذاب و آموزندهای است.
- مهم است هنگام طراحی: نور محیط، زاویه دید، کیفیت دوربین/سنسورها، سرعت ربات و شرایط مسیر را جدی بگیری؛ زیرا این عوامل تأثیر زیادی بر دقت خواهند داشت.



